


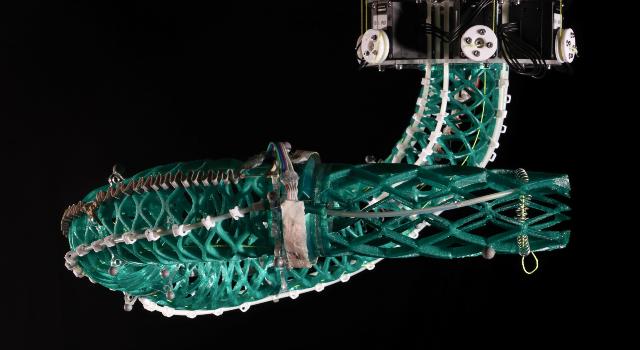
Traditional robotic arms offer precision but falter in safety, particularly for human interaction. Soft robots have long promised safety but have been lacking the precision and reliability necessary to match industrial standards. Helix aims to revolutionize the field of soft robotics by building on top of our publication in Nature npj Robotics. The research from the core team, composed of Francesco Stella, Prof. Josie Hughes and Prof. Cosimo Della Santina resulted in a patented novel structure that enables independent stiffness control for unprecedented safety and precision. We aim to build the first commercial soft manipulator and elevate this technology to TRL 5, targeting applications such as collaborative food handling and lab automation.
News
Milestones/News
